요약
- 센서는 힘(F)를 내부적으로 측정하는 게 아님
- 대신, 전기적 반응을 “가속도(a)”와 직접 연결시킴
- 센서 설계 시 m값과 변환계수(Gain)를 다 고려해서,
출력 = a (단위: m/s² 또는 g) 로 맞춰놓음
가속도 측정 flow
- 가속도(a) 발생
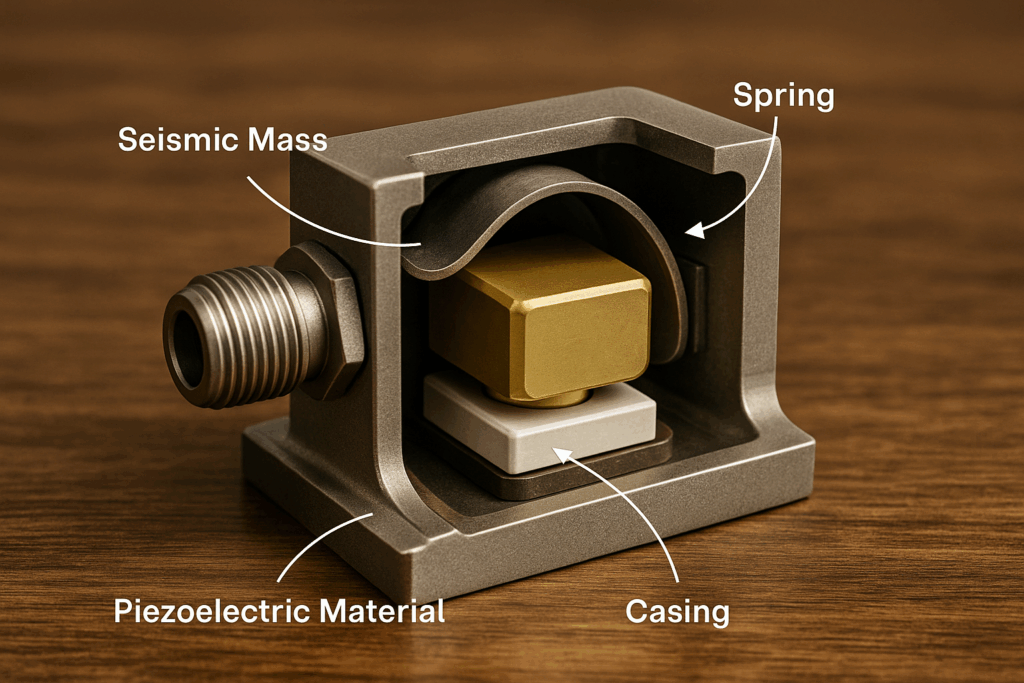
- 내부 **질량체(seismic mass)**가 움직임
- 이 움직임으로 인해 전기적 변화 발생
- 압전식: 전하(Q) 생성
- MEMS: 정전용량(C) 변화
- 아날로그 회로에서 전기신호로 변환
- 전압 변화, 전류 변화 등
- 필터링 (LPF, HPF, 노이즈 제거, 증폭 등)
- ADC (아날로그 → 디지털 변환)
- → 이미 공장에서 보정된 내부 질량값과 시스템 게인으로
👉 출력값 = 가속도(a)
👉과정에서 F 계산 안함. a가 바로 최종 출력값
구조도 / Schematic
답글 남기기